Dragonfly graduates after demonstrating production readiness, powering container and AI workloads at scale.
Key Highlights:
- Dragonfly graduates from CNCF after demonstrating production readiness and widespread adoption across container and AI workloads.
- Dragonfly is used by major organizations, including Ant Group, Alibaba, Datadog, DiDi, and Kuaishou to power large-scale container and AI model distribution.
- Since joining the CNCF, Dragonfly is backed by over a 3,000% growth in code contributions and a growing contributor community spanning over 130 companies.
SAN FRANCISCO, Calif. – January 14, 2026 – The Cloud Native Computing Foundation® (CNCF®), which builds sustainable ecosystems for cloud
native software, today announced the graduation of Dragonfly, a cloud native open source image and file distribution system designed to
solve cloud native image distribution in Kubernetes-centered applications.
“Dragonfly’s graduation reflects the project’s maturity, broad industry adoption and critical role in scaling cloud native infrastructure,” said Chris Aniszczyk, CTO, CNCF. “It’s especially exciting to see the project’s impact in accelerating image distribution and meeting the data demands of AI workloads. We’re proud to support a community that continues to push forward scalable, efficient and open solutions.”
Dragonfly’s Technical Capabilities
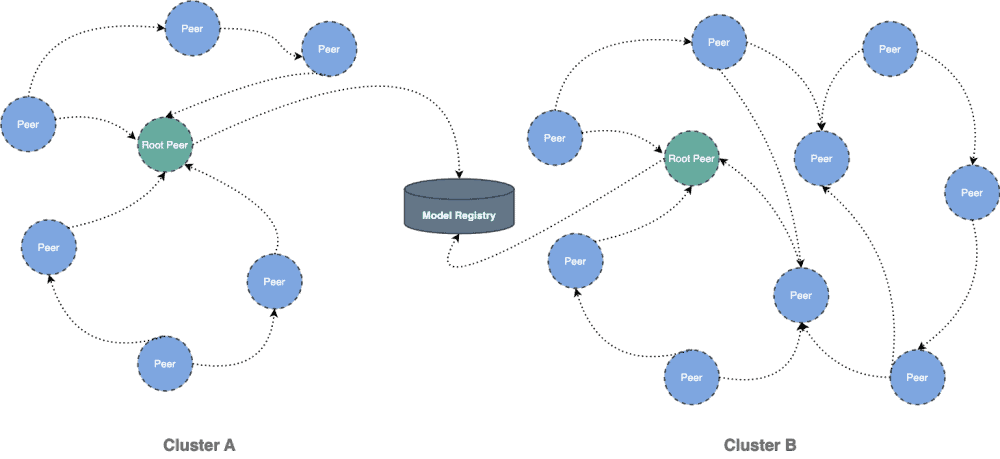
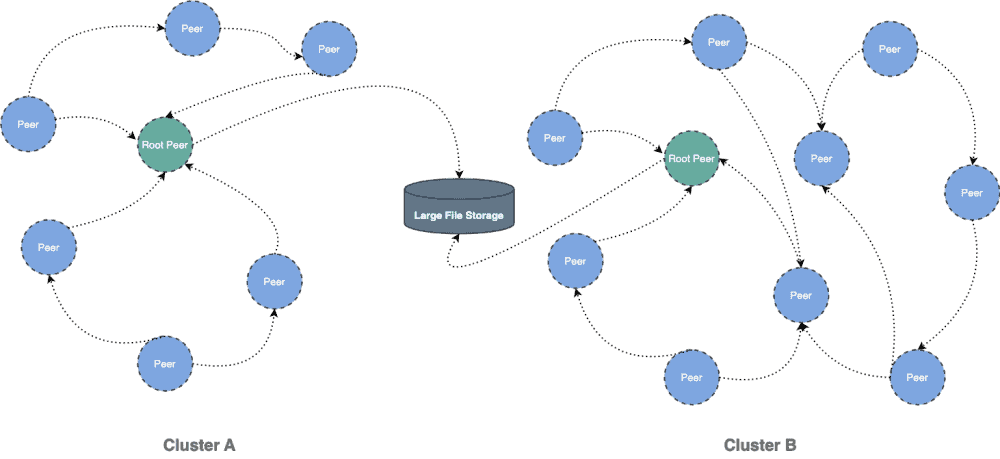
Dragonfly delivers efficient, stable, and secure data distribution and acceleration powered by peer-to-peer (P2P) technology.
It aims to provide a best‑practice, standards‑based solution for cloud native architectures to improve large‑scale delivery
of files, container images, OCI artifacts, AI models, caches, logs, and dependencies.
Dragonfly runs on Kubernetes and is installed via Helm, with its official chart available on Artifact Hub. It also includes tools
like Prometheus for tracking performance, OpenTelemetry for collecting and sharing data, and gRPC for rapid communication between parts.
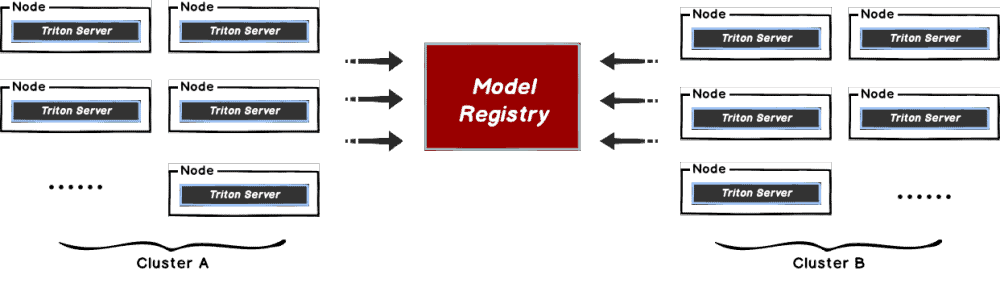
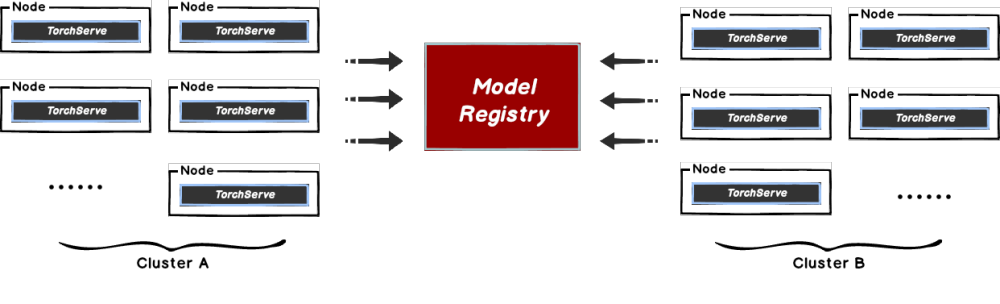
Enhancing Harbor capability to distribute images and OCI artifacts through the preheat feature. In the GenAI era, as model
serving becomes increasingly important, Dragonfly delivers even more value by distributing AI model artifacts defined by the ModelPack specification.
Dragonfly continues to advance container image distribution, supporting tens of millions of container launches per day in
production, saving storage bandwidth by up to 90%, and reducing launch time from minutes to seconds, with large-scale
adoption across different cloud native scenarios.
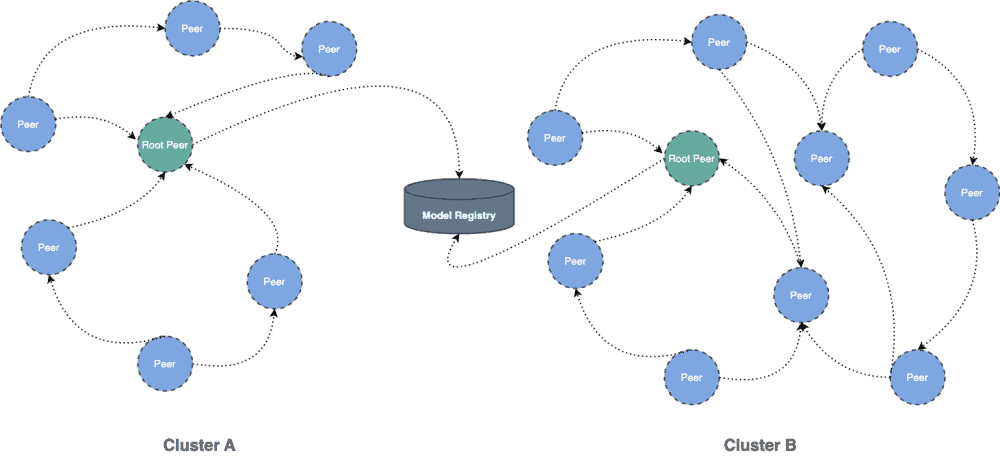
Dragonfly is also driving standards and acceleration solutions for distributing both AI model weights and optimized image layout in
AI workloads. The technology reduces data loading for large-scale AI applications and enables the distribution of model weights at
a hundred-terabyte scale to hundreds of nodes in minutes. As AI continues to integrate into operations, Dragonfly
becomes crucial to powering large-scale AI workloads.
Milestones Driving Graduation
Dragonfly was open-sourced by Alibaba Group in November 2017. It then joined the CNCF as a Sandbox project in October 2018.
During this stage, Dragonfly 1.0 became production-ready in November 2019 and the Dragonfly subproject, Nydus, was open-sourced
in January 2020. Dragonfly then reached Incubation phase in April 2020, with Dragonfly 2.0 later released in 2021.
Since then, the community has significantly matured and attracted hundreds of contributors from organizations such as
Ant Group, Alibaba Cloud, ByteDance, Kuaishou, Intel, Datadog, Zhipu AI, and more, who use Dragonfly to deliver efficient image and AI model distribution.
Since joining CNCF, contributors have increased by 500%, from 45 individuals across 5 companies to 271 individuals across over 130 companies.
Commit activity has grown by over 3,000%, from roughly 800 to 26,000 commits, and the number of overall participants has reached 1,890.
What’s Next For Dragonfly
Dragonfly will accelerate AI model weight distribution based on RDMA, improving throughput and reducing end-to-end latency.
It will also optimize image layout to reduce data loading time for large-scale AI workloads. A load-aware two-phase scheduling
will be introduced, leveraging collaboration between the scheduler and clients to enhance overall distribution efficiency.
To provide more stable and reliable services, Dragonfly will support automatic updates and fault recovery, ensuring stable
operation of all components during traffic bursts while controlling back-to-source traffic.
Dragonfly’s Graduation Process
To officially graduate from Incubation status, the Dragonfly team enhanced the election policy, clarified the maintainer lifecycle,
standardized the contribution process, defined the community ladder, and added community guidelines for subprojects.
The graduation process is supported by CNCF’s Technical Oversight Committee (TOC) sponsors for Dragonfly, Karena Angell and Kevin Wang,
who conducted a thorough technical due diligence with Dragonfly’s project maintainers.
Additionally, a third-party security audit of Dragonfly was conducted. The Dragonfly team along with the guidance of
their TOC sponsors, completed both a self-assessment and a joint assessment with CNCF TAG Security, then collaborated with
the Dragonfly security team on a threat model. After this, the team improved the project’s security policy.
Learn more about Dragonfly and join the community: https://d7y.io/
Supporting Quotes
“I am thrilled, as the founder of Dragonfly, to announce its graduation from the CNCF. We are grateful to
each and every open source contributor in the community, whose tenacity and commitment have enabled
Dragonfly to reach its current state. Dragonfly was created to resolve Alibaba Group’s challenges with ultra-large-scale
file distribution and was open-sourced in 2017. Looking back on this journey over the past eight years,
every step has embodied the open source spirit and the tireless efforts of the many contributors.
This graduation marks a new starting point for Dragonfly. I hope that the project will embark on a new journey, continue
to explore more possibilities in the field of data distribution, and provide greater value!”
—Zuozheng Hu, founder of Dragonfly, emeritus maintainer
“I am delighted that Dragonfly is now a CNCF graduated project. This is a significant milestone, reflecting the maturity of
the community, the trust of end users, and the reliability of the service. In the future, with the support of CNCF,
the Dragonfly team will work together to drive the community’s sustainable growth and attract more contributors.
Facing the challenges of large-scale model distribution and data distribution in the GenAI era, our team will continue to
explore the future of data distribution within the cloud native ecosystem.”
—Wenbo Qi (Gaius), core Dragonfly maintainer
“Since open-sourcing in 2020, Nydus, alongside Dragonfly, has been validated at production scale. Dragonfly’s graduation is
a key milestone for Nydus as a subproject, allowing the project to continue improving the image filesystem’s usability
and performance. It will also allow us to further explore ecosystem standardization and AGI use cases that will advance the underlying infrastructure.”
—Song Yan, core Nydus maintainer
“The combination of Dragonfly and Nydus substantially shortens launch times for container images and AI models, enhancing system resilience and efficiency.”
—Jiang Liu, Nydus maintainer
“Thanks to the community’s collective efforts, Dragonfly has evolved from a tool for accelerating container images into
a secure and stable distribution system widely adopted by many enterprises. Continuous improvements in usability and
stability enable the project to support a variety of scenarios, including CI/CD, edge computing, and AI.
New challenges are emerging for the distribution of model weights and data in the age of AI. Dragonfly is becoming
a key infrastructure in mitigating these challenges. With the support of the CNCF, Dragonfly will continue to
drive the future evolution of cloud native distribution technologies.”
—Yuan Yang, Dragonfly maintainer